728x90
Slerp(Spherical Linear Interpolation)
Interpolation betwee two orientations, and ?
- and can be represented by
- Euler-angles
- 3x3 matrices
- quaternions
- How can them be interpolated?
- Is the linear interpolation applicable?

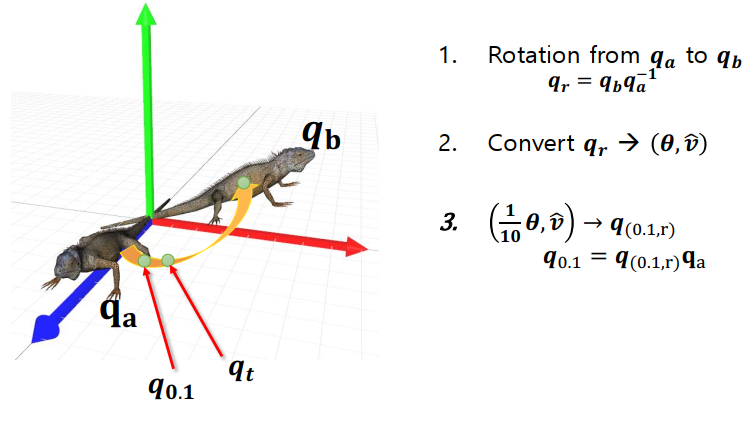
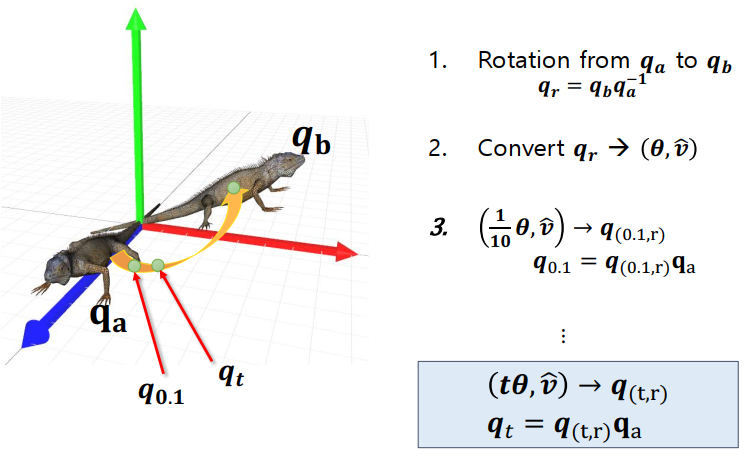
When the axis-angle is known,
Rotation between two orientations?
- Rotation between two SO(3) matrices, and
- Rotation between two quaternions, and
Quaternion → Axis-Angle
Rotation Matrix → Axis-Angle
Interpolation
Interpolation
Alternative Method
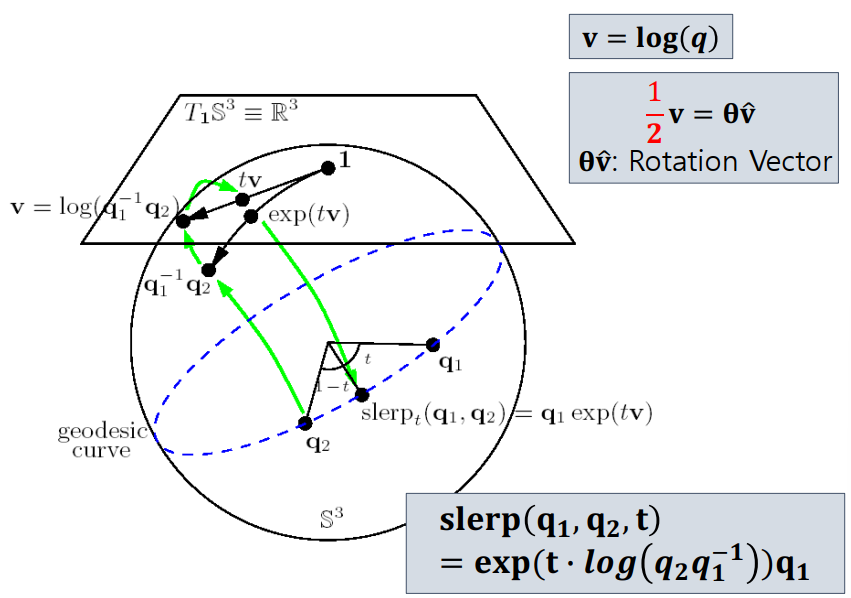
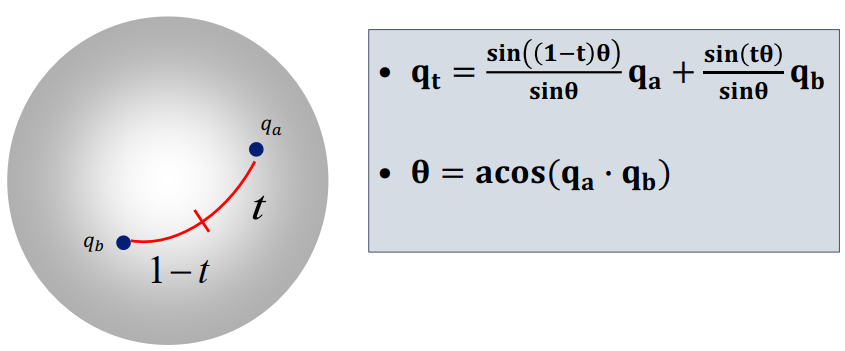
Quaternion Slerp
2D Complex Number Form
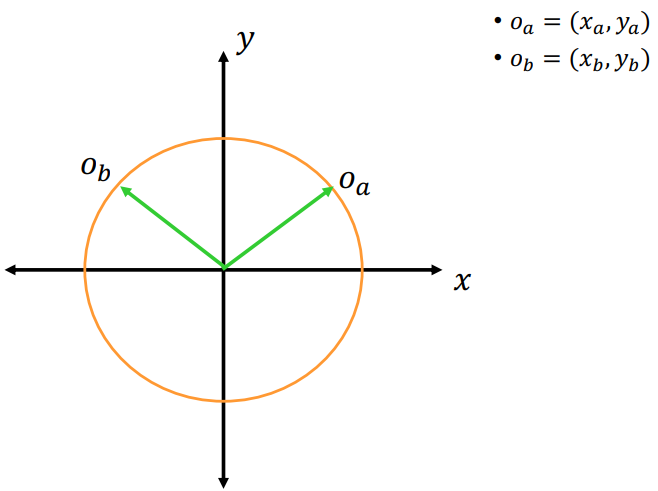
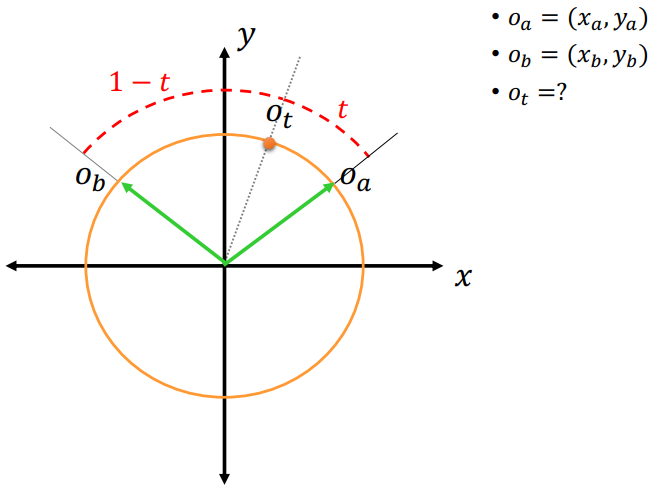
2D Spherical Interpolation
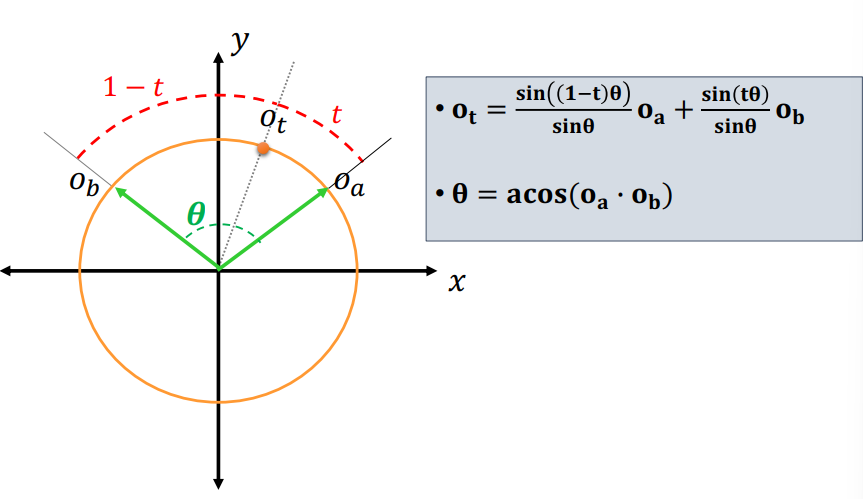
Spherical Linear Interpolation
- SLERP [Shoemake 1985]
- Linear Interpolation of two quaternions
Antipodal Equivalence Problem
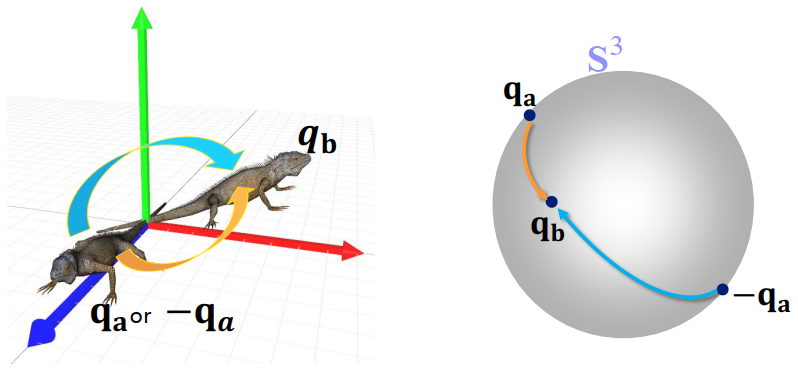
- In gerneral, the shorter pass is better
- You should test both and , and choose one
Rotation Matrix vs. Unit Quaternion
- Equivalent in many aspects
- No singularity
- Exp & Log
- Special tangent space
- Why quaternions?
- Fewer parameters
- Simpler algebra
- Easy to fix numerical error
- Why rotation matrices?
- One-to-one correspondence
- Handle rotation and translation in a uniform way
- Eg) 4x4 homogeneous matrices
728x90
'Computer Graphics' 카테고리의 다른 글
| [Computer Animation] Bezier Curve & Bezier Spline (0) | 2022.05.01 |
|---|---|
| [Computer Animation] Keyframing and Splines (0) | 2022.05.01 |
| [Unreal Engine 4] 블루프린트 클래스(Blueprint Class)에 Static Mesh 연결하기 (0) | 2022.04.24 |
| [Unreal Engine 4] 새로운 월드 생성 & 기본 환경 설정 (0) | 2022.04.16 |
| [Computer Animation] 3D Rotation and Orientation (0) | 2022.04.10 |
| [Computer Animation] 2D Rotation and Orientation (0) | 2022.04.03 |
| [Computer Animation] Linear Interpolation (0) | 2022.03.26 |
| [Computer Animation] Geometric Transformations (0) | 2022.03.26 |